
Miejsce pochodzenia:
Chiny
Nazwa handlowa:
YOUNGYOU
Orzecznictwo:
CE
Numer modelu:
PY4030U-050
Skontaktuj się z nami
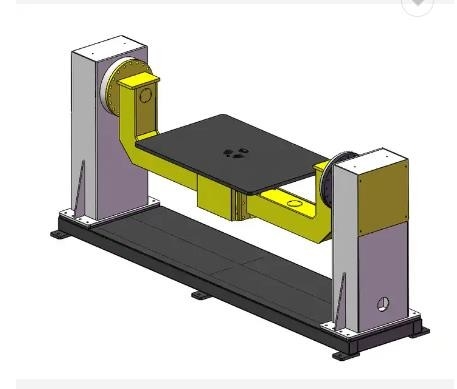




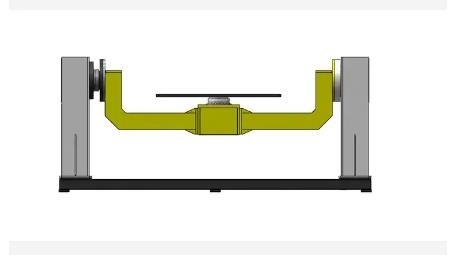
Wyprodukowano w chinach 1200*1200 gramofon 380 v 50-60 hz obciążenie osi 100-1000 kg dwuosiowy pozycjoner spawalniczy
Technologia nawigacji i pozycjonowania odbitego światła dla robotów mobilnych
Typowa metoda pozycjonowania nawigacyjnego odbitego światła wykorzystuje głównie czujniki laserowe lub na podczerwień do ustalania odległości.Zarówno laser, jak i podczerwień wykorzystują technologię odbicia światła do nawigacji i pozycjonowania.
Laserowy system globalnego pozycjonowania ogólnie składa się z laserowego mechanizmu obrotowego, odbłyśnika, optoelektronicznego urządzenia odbiorczego oraz urządzenia do gromadzenia i przesyłania danych.
Podczas pracy laser jest emitowany na zewnątrz przez obracający się mechanizm lustra.Podczas skanowania współpracującego punktu orientacyjnego składającego się z tylnego reflektora odbite światło jest przetwarzane przez odbiornik fotoelektryczny jako sygnał wykrywania.Program akwizycji danych jest uruchamiany w celu odczytania danych dysku kodu mechanizmu obrotowego (zmierzona wartość kąta celu), a następnie przesyłany do górnego komputera w celu przetwarzania danych za pośrednictwem komunikacji.Na podstawie znanej pozycji punktu orientacyjnego i wykrytych informacji można obliczyć bieżącą pozycję i kierunek czujnika w układzie współrzędnych punktu orientacyjnego, aby uzyskać dalszą nawigację i pozycjonowanie.
Zasięg lasera ma zalety wąskiej wiązki, dobrej równoległości, małego rozpraszania i wysokiej rozdzielczości w kierunku wyznaczania odległości, ale jest również w dużym stopniu uzależniony od czynników środowiskowych.Dlatego dużym wyzwaniem jest również odszumienie zebranego sygnału podczas korzystania z odległości laserowej.Ponadto zasięg laserowy ma również martwe punkty, co utrudnia nawigację i pozycjonowanie wyłącznie za pomocą lasera.W zastosowaniach przemysłowych, ogólnie rzecz biorąc, jest nadal szeroko stosowany w przemysłowych testach na miejscu w określonym zakresie, takich jak wykrywanie pęknięć rurociągów.
Technologia wykrywania w podczerwieni jest często stosowana w wieloprzegubowych systemach unikania przeszkód robotów w celu utworzenia dużego obszaru „wrażliwej skóry” robota, która pokrywa powierzchnię ramienia robota i może wykrywać różne obiekty napotykane przez ramię robota podczas pracy.
Typowy czujnik podczerwieni zawiera półprzewodnikową diodę elektroluminescencyjną, która może emitować światło podczerwone, oraz półprzewodnikową światłoczułą diodę, która służy jako odbiornik.Zmodulowany sygnał jest emitowany przez rurkę emitującą światło podczerwone, a lampa światłoczuła na podczerwień odbiera modulowany sygnał podczerwieni odbity od celu.Eliminację środowiskowych zakłóceń podczerwieni zapewnia modulacja sygnału oraz dedykowany filtr podczerwieni.Jeżeli sygnał wyjściowy Vo reprezentuje napięcie wyjściowe natężenia odbitego światła, to Vo jest funkcją odległości między sondą a przedmiotem obrabianym: Vo=f (x, p), gdzie p jest współczynnikiem odbicia przedmiotu obrabianego.P jest związane z kolorem powierzchni i chropowatością obiektu docelowego.X - Odległość między sondą a przedmiotem obrabianym.
Gdy przedmiot obrabiany jest tarczą tego samego typu z tą samą wartością p, x i Vo odpowiadają sobie jeden do jednego.X można uzyskać przez interpolację danych eksperymentalnych pomiarów bliskości różnych obiektów docelowych.W ten sposób odległość między robotem a obiektem docelowym może być mierzona za pomocą czujników podczerwieni, a inne metody przetwarzania informacji mogą być również wykorzystywane do nawigacji i lokalizacji robota mobilnego.
Chociaż pozycjonowanie w podczerwieni ma również zalety, takie jak wysoka czułość, prosta konstrukcja i niski koszt, ze względu na ich wysoką rozdzielczość kątową i rozdzielczość na małą odległość, są one powszechnie stosowane jako czujniki zbliżeniowe w robotach mobilnych do wykrywania zbliżających się lub nagłych przeszkód ruchowych, ułatwiając awaryjne zatrzymanie robotów.
![]()
O firmie
Nasza szyna prowadząca współpracowała z wieloma znanymi międzynarodowymi markami robotów, takimi jakABB KUKA FANUC Yaskawa UR.Firmy zajmujące się głównie paletyzacją, załadunkiem i rozładunkiem.Obciążenie szyny prowadzącej wynosi od500kg do 5000kg.Długość szyny prowadzącej jest dostosowana do potrzeb klientów.Ustaliliśmy, że robot ABB IRB6700 odpowiada 20 maszynom CNC, a szyna prowadząca o długości 50 m uzupełnia ruch posuwisto-zwrotny, załadunek i rozładunek robota.Liczba robotów jest znacznie zmniejszona, a koszty integracji są zaoszczędzone.
Nasza firma oferuje również roboty przemysłowe w bardzo korzystnych cenach do wspólnego składania zamówień w niższych cenach.
Witamy w Szanghaju w Chinach, aby zapoznać się z naszymi robotami i szynami!
Dostawa produktów firmy
robota ABB
robota KUKA
robota Yaskawy
robota Fanuca
Robot UR
Kobot
Szyna prowadząca
Kobot wyprodukowany w Chinach
Specyfikacja produktu
Tabela parametrów produktu

Pakowanie i transport
![]()
![]()
Wyślij zapytanie bezpośrednio do nas





