
Miejsce pochodzenia:
Chiny
Nazwa handlowa:
YOUNGYOU
Orzecznictwo:
CE
Numer modelu:
GBS6-C1400
Skontaktuj się z nami

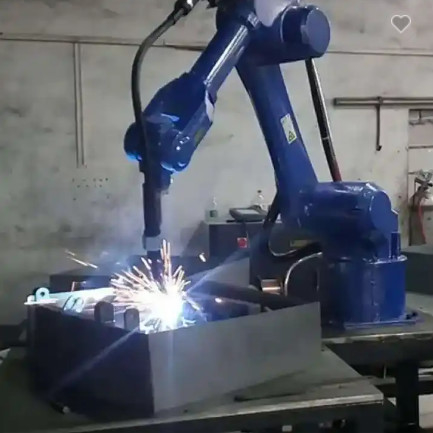

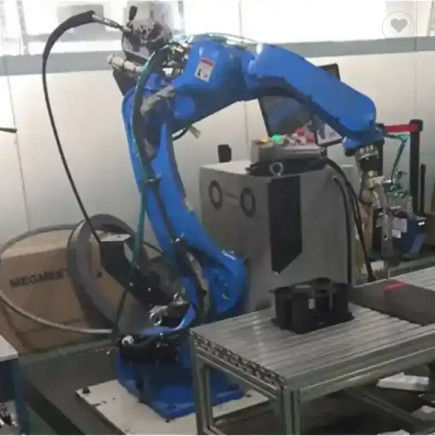

6-osiowy automatyczny robot spawalniczy ze spawarką elektryczną CHD MIG 500 i pozycjonerem spawalniczym
Ultradźwiękowa technologia nawigacji i pozycjonowania dla robotów mobilnych
Zasada działania nawigacji ultradźwiękowej i pozycjonowania jest podobna do zasady działania lasera i podczerwieni.Zwykle fale ultradźwiękowe są emitowane przez sondę emisyjną czujnika ultradźwiękowego, a fale ultradźwiękowe napotykają przeszkody w ośrodku i wracają do urządzenia odbiorczego.
Odbierając emitowany przez siebie odbity sygnał ultradźwiękowy i obliczając odległość propagacji S na podstawie różnicy czasu między emisją ultradźwięków a odbiorem echa oraz prędkości propagacji, można uzyskać odległość od przeszkody do robota.Istnieje wzór: S=Tv/2, gdzie T – różnica czasu między emisją a odbiorem ultradźwięków;V - Prędkość fal ultradźwiękowych rozchodzących się w ośrodku.
Oczywiście istnieje również wiele technologii nawigacji i pozycjonowania robotów mobilnych, które wykorzystują oddzielne urządzenia nadawcze i odbiorcze.Na mapie otoczenia rozmieszczonych jest wiele urządzeń odbiorczych, a na robocie mobilnym zainstalowane są sondy nadawcze.
W nawigacji i pozycjonowaniu robotów mobilnych, ze względu na nieodłączne wady czujników ultradźwiękowych, takie jak odbicie lustrzane i ograniczony kąt wiązki, trudno jest w pełni uzyskać informacje o otaczającym środowisku.Dlatego ultradźwiękowe systemy wykrywania składające się z wielu czujników są zwykle używane do ustalenia odpowiednich modeli środowiskowych, a informacje zebrane przez czujniki są przesyłane do systemu sterowania robota mobilnego za pośrednictwem komunikacji szeregowej. System sterowania następnie wykorzystuje określone algorytmy do przetwarzania odpowiednich dane oparte na zebranych sygnałach i ustalonym modelu matematycznym w celu uzyskania informacji o położeniu robota.
Ze względu na zalety niskiego kosztu, szybkiego tempa zbierania informacji i dużej rozdzielczości odległości, czujniki ultradźwiękowe są od dawna szeroko stosowane w nawigacji i pozycjonowaniu robotów mobilnych.Co więcej, nie wymaga złożonej technologii sprzętu do przetwarzania obrazu podczas zbierania informacji o środowisku, co skutkuje dużą szybkością i dobrą wydajnością w czasie rzeczywistym.
Jednocześnie czujniki ultradźwiękowe są również mniej podatne na zewnętrzne warunki środowiskowe, takie jak warunki pogodowe, światło otoczenia, cienie przeszkód i chropowatość powierzchni.Nawigacja i pozycjonowanie ultradźwiękowe znalazły szerokie zastosowanie w różnych systemach percepcyjnych robotów mobilnych.
![]()
O firmie
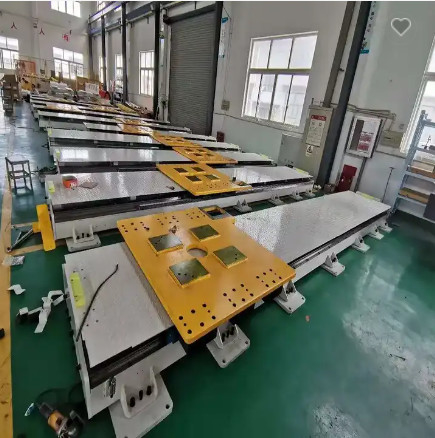
Nasza szyna prowadząca współpracowała z wieloma znanymi międzynarodowymi markami robotów, takimi jakABB KUKA FANUC Yaskawa UR.Firmy zajmujące się głównie paletyzacją, załadunkiem i rozładunkiem.Obciążenie szyny prowadzącej wynosi od500kg do 5000kg.Długość szyny prowadzącej jest dostosowana do potrzeb klientów.Ustaliliśmy, że robot ABB IRB6700 odpowiada 20 maszynom CNC, a szyna prowadząca o długości 50 m uzupełnia ruch posuwisto-zwrotny, załadunek i rozładunek robota.Liczba robotów jest znacznie zmniejszona, a koszty integracji są zaoszczędzone.
Nasza firma oferuje również roboty przemysłowe w bardzo korzystnych cenach do wspólnego składania zamówień w niższych cenach.
Witamy w Szanghaju w Chinach, aby zapoznać się z naszymi robotami i szynami!
Dostawa produktów firmy
robota ABB
robota KUKA
robota Yaskawy
robota Fanuca
Robot UR
Kobot
Szyna prowadząca
Kobot wyprodukowany w Chinach
Specyfikacja produktu
Tabela parametrów produktu
![]()
![]()
![]()
![]()
Pakowanie i transport
![]()
![]()
Wyślij zapytanie bezpośrednio do nas

