
Miejsce pochodzenia:
Chiny
Nazwa handlowa:
YOUNGYOU
Orzecznictwo:
CE RoHS
Numer modelu:
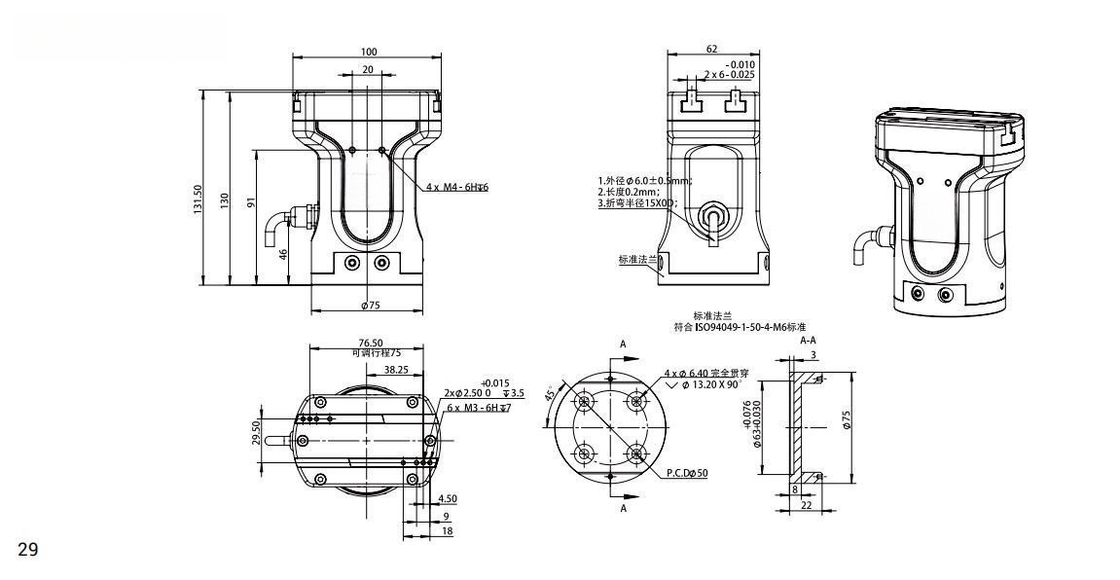
RG75-300
Skontaktuj się z nami

Ekonomiczny chwytak RG75-300 współpracuje z robotem współpracującym.Hałas poniżej 40dB
System sterowania
Układ sterowania chwytaka elektrycznego jest kluczowym elementem całego systemu, odpowiedzialnym za sterowanie siłą i położeniem docisku, składającym się zwykle z jednego lub więcej sterowników elektronicznych, czujników i elementów wykonawczych.
Sterownik elektroniczny: Sterownik elektroniczny chwytaka elektrycznego stanowi centrum układu sterowania, odpowiada za odbieranie i przetwarzanie sygnałów z czujników oraz sterowanie ruchem siłowników w celu uzyskania kontroli siły docisku i położenia.Sterowniki elektroniczne zazwyczaj wykorzystują szybkie mikroprocesory i wysokowydajne algorytmy sterowania, aby uzyskać szybkie i precyzyjne sterowanie.
Czujnik: Czujnik jest ważnym elementem układu sterowania serwoelektrycznego chwytaka, służącym do monitorowania siły i położenia zacisku.Czujniki zwykle wykorzystują czujniki siły i czujniki przemieszczenia.Czujniki siły służą do monitorowania wielkości siły docisku, podczas gdy czujniki przemieszczenia służą do monitorowania dokładności pozycji docisku.
Executor: Siłownik jest częścią wykonawczą elektrycznego układu sterowania chwytakiem, odpowiada za regulację siły docisku i położenia.Siłownik zwykle wykorzystuje komponenty, takie jak silnik prądu stałego i pręt śrubowy do regulacji siły zacisku i położenia poprzez kontrolowanie obrotu silnika oraz rozszerzanie i kurczenie się pręta śrubowego.
Aplikacja
Chwytaki elektryczne mają zalety, takie jak wysoka precyzja sterowania, szybka reakcja, programowalne sterowanie i niskie zużycie energii, i są szeroko stosowane w dziedzinach takich jak robotyka, zautomatyzowane linie montażowe i obrabiarki CNC.Konkretne zastosowania obejmują następujące aspekty:
1. Roboty: Chwytaki elektryczne są ważnym elementem automatyzacji produkcji robotów i mogą być wykorzystywane do zadań takich jak chwytanie, umieszczanie i montaż robotów.
2. Automatyczna linia montażowa: elektryczna szczęka mocująca może służyć do mocowania części i kontroli położenia automatycznej linii montażowej, co poprawia wydajność i jakość produkcji.
3. Obrabiarki CNC: Chwytaki elektryczne mogą być używane do mocowania części i kontroli położenia w obrabiarkach CNC, osiągając wysoką precyzję obróbki.
4. Pakowanie i drukowanie: Chwytaki elektryczne mogą być używane do mocowania papieru i kontroli pozycji w przemyśle opakowaniowym i poligraficznym, poprawiając wydajność i jakość produkcji.
O firmie
Nasza szyna prowadząca współpracowała z wieloma znanymi międzynarodowymi markami robotów, takimi jakABB KUKA FANUC Yaskawa UR.Firmy zajmujące się głównie paletyzacją, załadunkiem i rozładunkiem.Obciążenie szyny prowadzącej wynosi od500kg do 5000kg.Długość szyny prowadzącej jest dostosowana do potrzeb klientów.Ustaliliśmy, że robot ABB IRB6700 odpowiada 20 maszynom CNC, a szyna prowadząca o długości 50 m uzupełnia ruch posuwisto-zwrotny, załadunek i rozładunek robota.Liczba robotów jest znacznie zmniejszona, a koszty integracji są zaoszczędzone.
Nasza firma oferuje również roboty przemysłowe w bardzo korzystnych cenach do wspólnego składania zamówień w niższych cenach.
Witamy w Szanghaju w Chinach, aby zapoznać się z naszymi robotami i szynami!
Dostawa produktów firmy
robota ABB
robota KUKA
robota Yaskawy
robota Fanuca
Robot UR
Kobot
Szyna prowadząca
Kobot wyprodukowany w Chinach
Specyfikacja produktu
| Kod zamówienia | RG75-300-0L#-C0024-P65-A |
| Regulowany skok | 0-75 mm |
| Siła zacisku jednym palcem | 40-300 N |
| Czas otwarcia/zamknięcia | 0,55 sek |
| Powtarzalność pozycji | ±0,02 mm |
| *Maksymalne zalecane obciążenie | 6 kg |
| Czy jest obsługiwany | Wsparcie |
| Środowisko użytkowania | 5-40 ℃, poniżej 85% wilgotności względnej |
| Hałas podczas pracy | <40dB |
| Masy ciała | 1,5kg |
| KLASA IP | IP65 |
| Napięcie znamionowe | DC 24±10% V |
| Maksymalny prąd | 1,5 A |
| Prąd znamionowy | 0,55 A |
| Protokół komunikacyjny | Modbus RTU (RS 485) |
| Spełnia międzynarodowe standardy | CE, RoHS |
| Pionowe dopuszczalne obciążenie statyczne Fz | 400N |
| Dopuszczalny moment statyczny suwaka Mx | 2,5 N·m |
| Dopuszczalny moment statyczny suwaka My | 8 N·m |
| Dopuszczalny moment statyczny Mz suwaka | 8 N·m |
Tabela parametrów produktu![]()
![]()
![]()
Pakowanie i transport
![]()
![]()
Wyślij zapytanie bezpośrednio do nas

