
Miejsce pochodzenia:
Chiny
Nazwa handlowa:
YOUNGYOU
Orzecznictwo:
CE RoHS
Numer modelu:
ERG32-150T
Skontaktuj się z nami

Dodatni i ujemny elektryczny chwytak obrotowy o nieskończonym obrocie i wysokim momencie obrotowym/1000°/s
Zasada działania chwytaków elektrycznych
Chwytak elektryczny to urządzenie mechaniczne, które steruje otwieraniem i zamykaniem chwytaka za pomocą silnika elektrycznego w celu chwytania przedmiotów.Część zaciskowa chwytaka elektrycznego jest zwykle wykonana ze stali lub stopu aluminium i jest wewnętrznie wyposażona w komponenty, takie jak silnik elektryczny, reduktor, czujnik, sterownik itp. Po uruchomieniu silnika elektrycznego napędza on reduktor do obracania, powodując otwieranie i zamykanie chwytaka.Czujniki mogą wykrywać stopień otwarcia i zamknięcia chwytaka, a sterownik może sterować silnikiem, aby osiągnąć cel chwytania przedmiotów.
Zastosowanie chwytaków elektrycznych
Zastosowanie chwytaków elektrycznych jest bardzo szerokie, a poniżej przedstawiono kilka typowych scenariuszy zastosowań:
1. Przemysłowa linia produkcyjna: Na przemysłowych liniach produkcyjnych chwytaki elektryczne mogą być używane do chwytania różnych części, produktów itp., osiągając w ten sposób zautomatyzowaną produkcję.Może być używany w połączeniu z robotami, urządzeniami automatyki itp., znacznie poprawiając wydajność produkcji.
2. Magazynowanie logistyczne: W dziedzinie magazynowania logistycznego chwytaki elektryczne mogą służyć do podnoszenia towarów, pudeł itp., osiągając w ten sposób szybki załadunek i rozładunek towarów.Może być używany w połączeniu ze zautomatyzowanymi liniami przenośników, robotami magazynowymi itp., znacznie poprawiając wydajność logistyki.
3. Urządzenia medyczne: W dziedzinie urządzeń medycznych chwytaki elektryczne mogą być używane do chwytania narzędzi chirurgicznych, materiałów medycznych itp., osiągając w ten sposób zautomatyzowane operacje.Może być używany w połączeniu z robotami chirurgicznymi, sprzętem medycznym itp., znacznie poprawiając wydajność i dokładność chirurgiczną.
4. Życie rodzinne: W życiu rodzinnym chwytaki elektryczne mogą być używane do podnoszenia różnych przedmiotów, takich jak butelki z napojami, torby na żywność itp., Dzięki czemu są wygodne i szybkie.
O firmie
Nasza szyna prowadząca współpracowała z wieloma znanymi międzynarodowymi markami robotów, takimi jakABB KUKA FANUC Yaskawa UR.Firmy zajmujące się głównie paletyzacją, załadunkiem i rozładunkiem.Obciążenie szyny prowadzącej wynosi od500kg do 5000kg.Długość szyny prowadzącej jest dostosowana do potrzeb klientów.Ustaliliśmy, że robot ABB IRB6700 odpowiada 20 maszynom CNC, a szyna prowadząca o długości 50 m uzupełnia ruch posuwisto-zwrotny, załadunek i rozładunek robota.Liczba robotów jest znacznie zmniejszona, a koszty integracji są zaoszczędzone.
Nasza firma oferuje również roboty przemysłowe w bardzo korzystnych cenach do wspólnego składania zamówień w niższych cenach.
Witamy w Szanghaju w Chinach, aby zapoznać się z naszymi robotami i szynami!
Dostawa produktów firmy
robota ABB
robota KUKA
robota Yaskawy
robota Fanuca
Robot UR
Kobot
Szyna prowadząca
Kobot wyprodukowany w Chinach
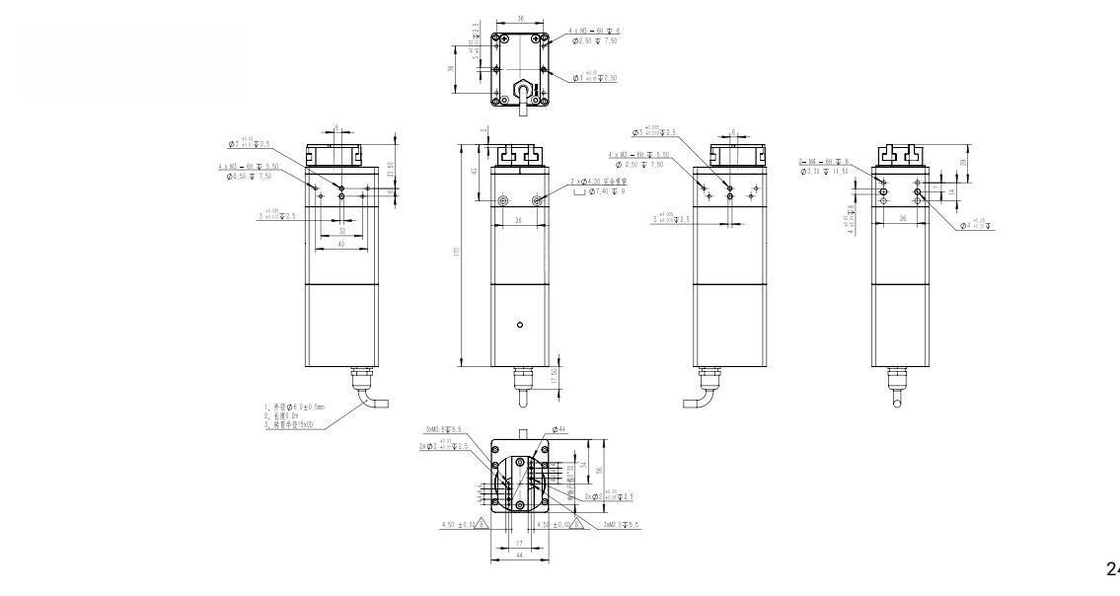
Specyfikacja produktu
| Kod zamówienia |
ERG32-150-1L#-C0024-P40-A
|
| Regulowany skok | 0-32 mm |
| Siła zacisku jednym palcem | 40~100 N |
| Czas otwarcia/zamknięcia | 0,5 sek |
| Powtarzalność pozycji | ±0,02 mm |
| Maksymalna waga ładunku | 0,5kg |
| Czy jest obsługiwany | Wsparcie |
| Środowisko użytkowania | 5-40 ℃, poniżej 85% wilgotności względnej |
| Hałas podczas pracy | <70dB |
| Masy ciała | 0,7kg |
| KLASA IP | IP40 |
| Napięcie znamionowe | DC 24±10% V |
| Maksymalny prąd | 4A |
| Prąd znamionowy | 0,6 A |
| Protokół komunikacyjny |
Modbus RTU (RS 485)
|
| Spełnia międzynarodowe standardy | CE, RoHS |
| Pionowe dopuszczalne obciążenie statyczne Fz | 200N |
| Dopuszczalny moment statyczny suwaka Mx | 2 N·m |
| Dopuszczalny moment statyczny suwaka My | 2 N·m |
| Dopuszczalny moment statyczny Mz suwaka | 2 N·m |
Tabela parametrów produktu
![]()
![]()
Pakowanie i transport
![]()
![]()
Wyślij zapytanie bezpośrednio do nas

