
Miejsce pochodzenia:
Chiny
Nazwa handlowa:
YOUNGYOU
Orzecznictwo:
CE
Numer modelu:
LT-PG3-80B-PB
Skontaktuj się z nami

LT-PG3-80B-PB Trzy wyznaczone środkowe mechaniczne pazury zaciskowe Powtarzalna dokładność 0,01
Główne funkcje ludzkiego efektora końcowego
Efektor końcowy robota to termin specjalistyczny w branży robotyki, który może być trudny do zrozumienia dla wielu użytkowników, którzy nie są zaznajomieni z branżą robotyki.Mówiąc najprościej, efektor końcowy odnosi się do części robota, która chwyta i pracuje, co odpowiada ludzkim dłoniom i palcom.Główną funkcją tego komponentu jest chwytanie przedmiotów obrabianych i wykonywanie różnych powiązanych zadań roboczych i jest to bardzo ważny główny komponent produktów robotów.
Główne typy efektorów końcowych robotów
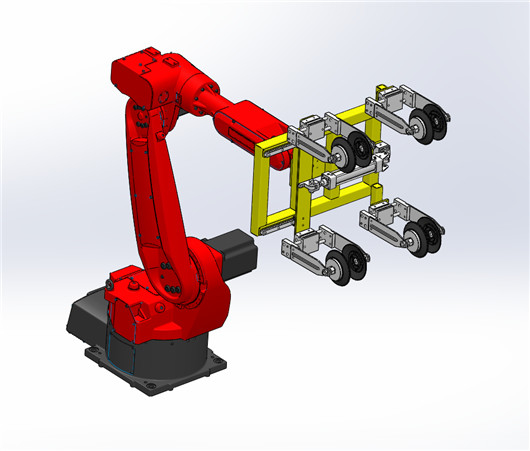
Obecnie, zgodnie z potrzebami różnych przedsiębiorstw, WOMMER Worm opracował różne kształty i funkcje efektorów końcowych robotów, w tym siłowniki chwytaków równoległych z dwoma palcami i siłowniki chwytaków równoległych z trzema palcami.Ponadto, aby umożliwić robotowi lepszą obsługę dużych przedmiotów obrabianych, istnieją również efektory końcowe, które wykorzystują energię pneumatyczną jako źródło zasilania, aby zapewnić robotowi większą energię kinetyczną,
Efektory końcowe robotów są przedmiotem badań i rozwoju produktów robotów.Obecnie przedsiębiorstwa produkujące roboty, takie jak WOMMER Worm, opracowały efektory końcowe o różnych funkcjach i cechach oraz zapewniły przedsiębiorstwom doskonałą wydajność pracy w praktycznym zastosowaniu.
![]()
O firmie
Nasza szyna prowadząca współpracowała z wieloma znanymi międzynarodowymi markami robotów, takimi jakABB KUKA FANUC Yaskawa UR.Firmy zajmujące się głównie paletyzacją, załadunkiem i rozładunkiem.Obciążenie szyny prowadzącej wynosi od500kg do 5000kg.Długość szyny prowadzącej jest dostosowana do potrzeb klientów.Ustaliliśmy, że robot ABB IRB6700 odpowiada 20 maszynom CNC, a szyna prowadząca o długości 50 m uzupełnia ruch posuwisto-zwrotny, załadunek i rozładunek robota.Liczba robotów jest znacznie zmniejszona, a koszty integracji są zaoszczędzone.
Nasza firma oferuje również roboty przemysłowe w bardzo korzystnych cenach do wspólnego składania zamówień w niższych cenach.
Witamy w Szanghaju w Chinach, aby zapoznać się z naszymi robotami i szynami!
Dostawa produktów firmy
robota ABB
robota KUKA
robota Yaskawy
robota Fanuca
Robot UR
Kobot
Szyna prowadząca
Kobot wyprodukowany w Chinach
Specyfikacja produktu
| Model | LT-PG2-80B-PB |
| Skok jednym palcem (mm) | 4 |
| Minimalna siła trzymania (N) | / |
| Siła zamykania (N) | 3780 |
| Zhang Kaili (N) | 4120 |
| Sugerowana masa detalu (kg) ① | 18.9 |
| Masa własna (kg) | 1.1 |
| Minimalne ciśnienie powietrza (Mpa) | 0,4 |
| Znamionowe ciśnienie powietrza (Mpa) | 0,6 |
| Maksymalne ciśnienie powietrza (Mpa) | 0,6 |
| Stopień ochrony (IP) | IP40 |
| Czas otwarcia/zamknięcia (s) | 0,1/0,1 |
| Powtarzalna dokładność (mm) | 0,01 |
| Zużycie gazu (cm3) (w obie strony) | 120 |
| Maksymalna długość palca (mm) | 80 |
| Maksymalna waga palców (kg) | 0,6 |
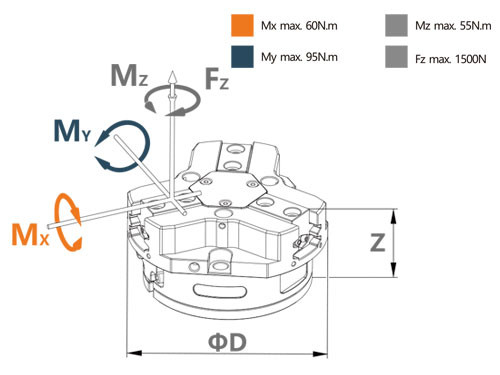
| Moment obrotowy Mx (N·m) | 60 |
| Moment My (N · m) | 95 |
| Moment Mz (N·m) | 55 |
| Maksymalna siła osiowa Fz (N) | 1500 |
Tabela parametrów produktu
![]()
![]()
![]()
Pakowanie i transport
![]()
![]()
Wyślij zapytanie bezpośrednio do nas

