
Miejsce pochodzenia:
Chiny
Nazwa handlowa:
YOUNGYOU
Orzecznictwo:
CE
Numer modelu:
EW08-1
Skontaktuj się z nami

Rosyjskie oprogramowanie do programowania robotów obsługujące kalibrację danych skanowania 3D w chmurze
Koncentrujemy się na oprogramowaniu do projektowania wizualnego i symulacji do programowania robotów przemysłowych,
Po prawie 10 latach prac badawczo-rozwojowych, iteracji i aktualizacji wersji, posiada szereg podstawowych technologii:
Obejmuje samodzielnie opracowany silnik renderowania 3D, topologię geometryczną, oparty na funkcjach, adaptacyjny algorytm rozwiązania
Pozycjonowanie robotów wielu marek, wykrywanie kolizji, symulacja kodu itp.
W zeszłym roku nasze oprogramowanie dodało obsługę wielu języków, takich jak angielska, tradycyjna chińska i rosyjska wersja dla inżynierów z całego świata
![]()
Proces użytkowania produktu
1. Pobierz model robota z biblioteki zasobów w chmurze
2. Dostosuj robota;
3. Zaimportuj model.Budowa sceny;
4. Generowanie torów;
5. Weryfikacja symulacji;
6. Kod pocztowy;
7. Obsługa robota;
8. Robot kończy pracę
![]()
![]()
Podczas korzystania z oprogramowania możesz przekazać nam napotkane problemy za pośrednictwem wbudowanej funkcji, a my udzielimy Ci profesjonalnych odpowiedzi za pośrednictwem WhatsApp, e-maila itp.
![]()
![]()
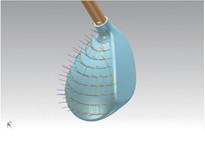
Generowanie i edytowanie ścieżek
Istnieje dziewięć rodzajów metod generowania torów, setki parametrów torów i dziesiątki sparametryzowanych metod modyfikacji torów.
Obliczanie dostępnej przestrzeni w czasie rzeczywistym
Oprogramowanie może nie tylko obliczyć dostępną przestrzeń pozycji kołnierza robota, ale także dostępną przestrzeń efektora końcowego robota, dzięki czemu projektowanie stacji roboczej i planowanie trajektorii jest bardziej realistyczne i wydajne.
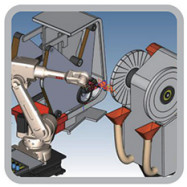
Programowanie narzędzi zewnętrznych
Istnieją dwa popularne tryby pracy robotów:
① Narzędzia ręczne, części stałe;② Ręczne części i stałe narzędzia;
Drugi nazywa się narzędziem zewnętrznym, które jest bardziej złożone w programowaniu.Oprogramowanie zapewnia zewnętrzne narzędzia, narzędzia do przemieszczania, ciągły TCP, układ współrzędnych przedmiotu obrabianego itp., które mogą być używane razem, dzięki czemu ręczne części nie są już skomplikowane.
wykrywanie kolizji
Podczas symulacji funkcja wykrywania kolizji jest włączona, aby symulować i wykrywać kolizję między robotem a otaczającymi go częściami i obiektami podczas ruchu, a następnie monitować o to, podświetlając linię i wyświetlając informacje o kolizji.
Optymalizacja toru
Może odzwierciedlać osobliwość, limit osi, nieosiągalność, kolizję i inne informacje na ścieżce w interfejsie oraz automatycznie unikać kolizji, przeciągając mysz, aby szybko uzyskać idealną ścieżkę i poprawić wydajność pracy.
Zewnętrzne połączenie wału
Dzięki funkcji interpolacji łączenia osi zewnętrznych użytkownicy mogą optymalizować położenie osi zewnętrznych, aby uzyskać płynny ruch wzdłuż całej ścieżki narzędzia, bez konieczności ręcznego modyfikowania punktów kontrolnych pozycji docelowej między każdym robotem.
Wyślij zapytanie bezpośrednio do nas

