

2023-07-12
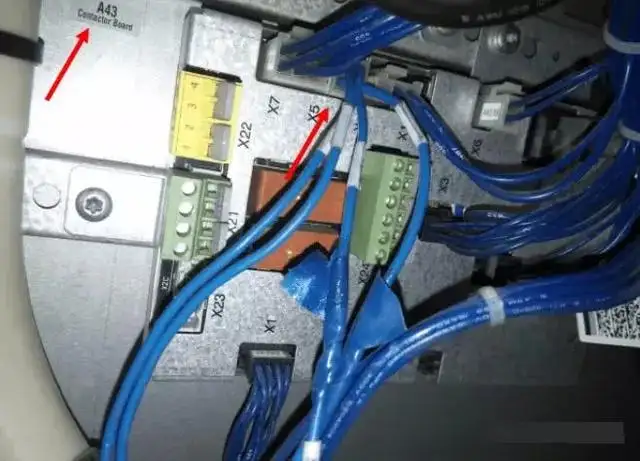
2. Postępowanie w przypadku zwarcia płytki zwarcia modułu zasilania robota ABB
Czynniki ludzkie: Wymiana sprzętu podczas pracy jest bardzo niebezpieczna, a wiele awarii płytek drukowanych jest spowodowanych przez wymianę podczas pracy.Niewłaściwe użycie siły podczas wkładania kart i wtyczek z zasilaniem może spowodować uszkodzenie interfejsów, chipów itp., prowadząc do uszkodzenia płytki drukowanej robota;W miarę wydłużania się czasu użytkowania robotów elementy na płytce drukowanej robota naturalnie się starzeją, co prowadzi do awarii płytki drukowanej robota.
Czynniki środowiskowe: Ze względu na niewłaściwą konserwację przez operatora, płytka drukowana robota jest pokryta kurzem, co może powodować zwarcia sygnału.
3. Kiedy konieczne jest tworzenie kopii zapasowych robotów przemysłowych
Po pierwszym włączeniu nowej maszyny.
Przed dokonaniem jakichkolwiek modyfikacji.
3. Po zakończeniu modyfikacji.
4. Jeśli roboty przemysłowe są ważne, powinny być wykonywane regularnie raz w tygodniu.
5. Kopię zapasową najlepiej wykonać również na dysku USB.
6. Regularnie usuwaj stare kopie zapasowe, aby zwolnić miejsce na dysku twardym.
4. Jak postępować w sytuacji, gdy robot jest włączony, a pilot uczący ciągle wyświetla następujący interfejs
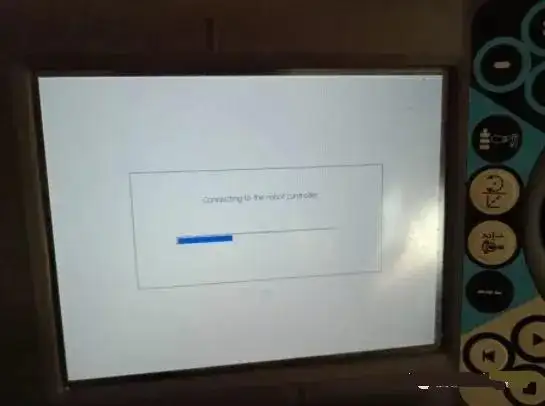 Powyższa sytuacja polega na tym, że nie ma nawiązanego połączenia komunikacyjnego pomiędzy panelem uczącym a głównym kontrolerem robota, a przyczyny nienawiązania połączenia to:
Powyższa sytuacja polega na tym, że nie ma nawiązanego połączenia komunikacyjnego pomiędzy panelem uczącym a głównym kontrolerem robota, a przyczyny nienawiązania połączenia to:
1. Host robota jest uszkodzony.
2. Wbudowana karta CF (karta SD) hosta robota jest uszkodzona.
3. Kabel sieciowy między panelem uczącym a hostem jest luźny itp.
Metoda przetwarzania: 1. Sprawdź, czy host jest normalny i czy karta SD w hoście jest normalna.
2. Sprawdź, czy kabel sieciowy łączący panel uczący z hostem jest prawidłowo podłączony.
5. Jakie jest znaczenie przypomnienia o czasie konserwacji 10106, gdy robot wyświetla komunikat alarmowy?
Ta sytuacja to inteligentne przypomnienie o okresowej konserwacji robota ABB.
6. Jak poradzić sobie z awarią systemu, gdy robot wchodzi w stan włączenia zasilania?
1. Uruchom ponownie robota raz.
Jeśli nie, sprawdź panel uczący, aby uzyskać bardziej szczegółowe monity alarmowe i podejmij działania.
3. Uruchom ponownie.
4. Jeśli nadal nie można go zwolnić, spróbuj uruchomić B.
5. Jeśli nadal nie działa, spróbuj uruchomić P.
6. Jeśli nadal nie działa, spróbuj uruchomić (spowoduje to przywrócenie robota do ustawień fabrycznych, bądź ostrożny).
7. Czy kopia zapasowa robota może być współdzielona przez wiele robotów?
Nie. Na przykład kopia zapasowa robota A może być użyta tylko dla robota A, a nie dla robota B lub C, ponieważ może to spowodować awarie systemu.
8. Jakie pliki można udostępniać w kopii zapasowej robota?
Jeśli dwa roboty są tego samego modelu i konfiguracji.Możesz udostępnić program RAPID i plik EIO, ale po udostępnieniu należy go również zweryfikować, zanim będzie można go normalnie używać.
9. Jakie jest mechaniczne pochodzenie robotów?Gdzie jest mechaniczne pochodzenie?
Każdy z sześciu serwomotorów robota ma unikalne, stałe pochodzenie mechaniczne.Nieprawidłowe ustawienie pochodzenia mechanicznego robota spowoduje problemy, takie jak ograniczony lub nieprawidłowy ruch robota, niemożność chodzenia po linii prostej oraz poważne uszkodzenie robota.
10. Jak skasować alarm monitorowania działania robota 50204?
1. Zmodyfikuj parametry monitorowania działania robota (w menu monitorowania działania panelu sterowania), aby dopasować je do rzeczywistej sytuacji.
2. Użyj polecenia AccSet, aby zmniejszyć przyspieszenie robota.
3. Zmniejsz v w danych prędkości_ Opcja rot.
11. Jak poradzić sobie z alarmem „50296, różnica danych pamięci SMB”, gdy robot jest włączany po raz pierwszy?
1. Wybierz opcję Kalibracja z menu głównego ABB.
2. Kliknij ROB_ 1. Przejdź do ekranu kalibracji i wybierz pamięć SMB.
3. Wybierz „Zaawansowane”, wejdź i kliknij „Wyczyść pamięć szafy sterowniczej”.
4. Po zakończeniu kliknij „Zamknij”, a następnie kliknij „Aktualizuj”.
5. Wybierz „Zamieniona szafa sterownicza lub ramię robota, aktualizacja szafy sterowniczej danymi pamięci SMB”.
12. Jak dostosować prędkość ruchu po trajektorii robota w programie RAPID?
1. Wybierz Dane programu z głównego menu pilota uczącego.
2. Po znalezieniu typu danych Speeddata kliknij Nowy.
3. Kliknij na wartość początkową, a znaczenia czterech zmiennych Speeddata są następujące: v_ TCP reprezentuje liniową prędkość ruchu robota, v_ Rot reprezentuje prędkość obrotową robota, v_ Leax reprezentuje liniową prędkość operacyjną osi zewnętrznej , v_ Reax reprezentuje prędkość obrotową osi zewnętrznej.Jeśli nie ma osi zewnętrznej, dwóch ostatnich nie trzeba modyfikować.
4. Dostosowane dane można wywołać w programie RAPID.
13. Rozwiązywanie 6 typowych usterek podczas naprawy serwomotorów robotów ABB
1. Jak poradzić sobie z błędem przepełnienia licznika błędów silnika podczas obracania się z dużą prędkością?
Błąd przepełnienia licznika błędów silnika występuje podczas obracania się z dużą prędkością.
Środek zaradczy 1: Sprawdź, czy okablowanie kabla zasilającego silnik i kabla enkodera jest prawidłowe i czy kabel nie jest uszkodzony.
Błąd przepełnienia licznika błędów silnika występuje podczas wprowadzania długiego impulsu sterującego.
Podczas pracy wystąpił błąd przepełnienia licznika błędów silnika.
Środek zaradczy 2: Zwiększ wartość ustawienia poziomu przepełnienia licznika błędów;Zmniejsz prędkość obrotową;Wydłuż czas przyspieszania i zwalniania;Obciążenie jest zbyt duże i konieczne jest wybranie od podstaw silnika o większej pojemności lub zmniejszenie obciążenia oraz zainstalowanie organizacji przekładni, takich jak reduktory, aby zwiększyć obciążenie.
2. Co należy zrobić, jeśli nie działa, gdy jest wyjście impulsowe?
Nadzoruj aktualną wartość wyjścia impulsowego kontrolera i czy lampka wyjścia impulsowego miga, potwierdź, że impuls polecenia został spełniony i teraz wysyła normalnie;
Sprawdź, czy kabel sterujący, kabel zasilający i kabel enkodera od sterownika do sterownika są nieprawidłowo podłączone, uszkodzone lub mają słaby styk;
Sprawdź, czy hamulec serwomotoru z hamulcem został teraz otwarty;
Nadzorować, czy panel serwowzmacniacza potwierdza wprowadzanie poleceń impulsowych;
Polecenie Uruchom operację jest normalne;
Forma kontroli musi wybrać formę kontroli kierunkowej;
Czy typ impulsu wejściowego ustawiony przez serwonapęd jest zgodny z ustawieniem impulsu sterującego;
Upewnij się, że napęd po stronie dodatniej jest zatrzymany, sygnał zatrzymania napędu po stronie obrotowej i sygnał resetowania licznika błędów nie są wprowadzane, obciążenie jest odłączone, a praca bez obciążenia jest normalna.Sprawdź układ mechaniczny.
3. Co powinienem zrobić, jeśli nie ma raportu o przeciążeniu ładunkiem?
Jeśli występuje, gdy podłączony jest sygnał pracy serwomechanizmu i nie jest emitowany żaden impuls:
Sprawdź okablowanie kabla zasilającego serwomotoru, aby zobaczyć, czy nie ma słabego styku lub uszkodzenia kabla;Jeżeli jest to serwomotor z hamulcem, hamulec musi być włączony;Czy wzmocnienie pętli prędkości jest ustawione zbyt wysoko;Czy ustawiona stała czasowa całkowania pętli prędkości jest zbyt mała.
Jeśli serwomechanizm działa nieprawidłowo tylko podczas pracy:
Czy wzmocnienie obwodu azymutalnego nie jest ustawione zbyt wysoko;Czy ustawiona amplituda zakończenia pozycjonowania jest zbyt mała;Sprawdź, czy nie ma zablokowanego wirnika na wale serwomotoru i wyreguluj maszynę od podstaw.
4. Jak radzić sobie z nietypowymi dźwiękami lub wibracjami podczas pracy?
Okablowanie serwa:
Użyj znormalizowanych kabli zasilających, kabli enkodera, kabli sterujących i kabli, aby sprawdzić, czy nie są uszkodzone;Sprawdź, czy w pobliżu linii sterującej nie występują źródła zakłóceń oraz czy nie są one równoległe lub zbyt blisko pobliskich przewodów zasilających wysokiego napięcia;Sprawdź, czy nastąpiła jakakolwiek zmiana potencjału zacisku uziemiającego, aby zapewnić doskonałe uziemienie.
Parametry serwa:
Ustawienie wzmocnienia serwomechanizmu jest zbyt duże i zaleca się ręczne lub aktywne dostosowanie parametrów serwomechanizmu od podstaw;Potwierdzając ustawienie stałej czasowej filtra odpowiedzi prędkościowej, z wartością początkową równą 0, możliwe jest zwiększenie wartości zadanej poprzez testowanie;Ustawienie elektronicznego przełożenia jest zbyt duże, co sugeruje przywrócenie ustawień fabrycznych;Rezonans między układem serwomechanizmu a układem mechanicznym, testowanie i regulacja częstotliwości i amplitudy filtra wycinającego.
Układ mechaniczny:
Sprzęgło łączące wał silnika z układem osprzętu odchyliło się, a śruby montażowe nie zostały dokręcone;Słabe zazębienie kół pasowych lub kół zębatych może również prowadzić do zmian momentu obciążenia.Przetestuj działanie bez obciążenia.Jeśli praca bez obciążenia jest normalna, sprawdź, czy nie ma żadnych nieprawidłowości w części łączącej układu mechanicznego;Przyznaj, czy bezwładność obciążenia, moment obrotowy i prędkość są zbyt duże, przetestuj działanie bez obciążenia, a jeśli działanie bez obciążenia jest normalne, zmniejsz obciążenie lub wymień sterownik i silnik na większą pojemność.
5. Jak poradzić sobie z niedokładną kontrolą orientacji i pozycjonowaniem podczas naprawy serwomotoru robota ABB?
W pierwszej kolejności należy potwierdzić, czy rzeczywista zadeklarowana wartość impulsu sterownika jest zgodna z wartością oczekiwaną, a jeśli nie, sprawdzić i poprawić program;
Nadzorować, czy liczba rozkazów impulsowych otrzymanych przez serwowzmacniacz odpowiada liczbie ogłaszanej przez sterownik.Jeśli nie, sprawdź przewód sterujący;Sprawdź, czy ustawienie formy impulsu polecenia serwomechanizmu jest zgodne z ustawieniem sterownika, np. CW/CCW lub impuls+kierunek;
Ustawienie wzmocnienia serwa jest zbyt duże, proszę ręcznie lub aktywnie dostosować wzmocnienie serwa od zera;Serwomotor jest podatny na skumulowane błędy podczas ruchu posuwisto-zwrotnego.Zaleca się ustawienie mechanicznego sygnału pochodzenia w warunkach dozwolonych przez proces i wykonanie operacji wyszukiwania pochodzenia, zanim błąd przekroczy dozwoloną skalę;Sam system mechaniczny ma niską dokładność lub nieprawidłową organizację transmisji (taką jak odchylenie sprzężenia między serwomotorem a systemem wyposażenia).
6. Naprawa serwomotoru robota ABB, działanie sterowania kierunkowego, zgłoszona usterka przekroczenia prędkości.Jak sobie z tym poradzić?
Gdy tylko zostanie podłączony sygnał pracy serwa, zostanie uruchomiony: sprawdź, czy okablowanie kabla zasilającego serwosilnika i kabla enkodera jest prawidłowe i nieuszkodzone.
14. W jaki sposób roboty przemysłowe ABB poddawane są rutynowej konserwacji?
Przed przystąpieniem do normalnego działania „kontroli hamulców” należy sprawdzić hamulec silnika każdej osi.Metoda kontroli hamulca silnika jest następująca:
1. Ustaw oś każdego ramienia robota w pozycji maksymalnego obciążenia.
2. Ustaw przełącznik wyboru trybu pracy silnika na sterowniku robota w pozycji MOTORS OFF.
3. Sprawdź, czy wałek znajduje się w swoim pierwotnym położeniu.Jeśli mechaniczne ramię nadal utrzymuje swoją pozycję po wyłączeniu silnika, oznacza to, że hamulec jest w dobrym stanie.
Niebezpieczeństwo utraty funkcji zwalniania (250 mm/s).
Nie zmieniaj przełożenia ani innych parametrów ruchu z poziomu komputera lub pilota uczącego.Wpłynie to na działanie funkcji zwalniania (250 mm/s).
15. Kilka punktów, na które należy zwrócić uwagę podczas bezpiecznego korzystania z pomocy dydaktycznych:
Przycisk włączania urządzenia zainstalowany na pilocie uczącym, po wciśnięciu do połowy przełącza system w tryb SILNIKI WŁĄCZONE.Po zwolnieniu lub całkowitym wciśnięciu przycisku system przechodzi w tryb WYŁĄCZONE SILNIKI.
16. W celu bezpiecznego korzystania z pomocy dydaktycznych należy przestrzegać następujących zasad:
1. Gdy przycisk urządzenia zezwalającego nie może utracić swojej funkcji podczas programowania lub debugowania, a robot nie musi się poruszać, natychmiast zwolnij przycisk urządzenia zezwalającego.
2. Gdy personel programujący wkracza w bezpieczny obszar, musi zawsze mieć przy sobie panel uczący, aby uniemożliwić innym poruszanie się robotem.
17. Podczas pracy w zasięgu roboczym ramienia robota należy przestrzegać następujących punktów:
1. Przełącznik wyboru trybu na sterowniku musi być ustawiony w pozycji ręcznej, aby zadziałało urządzenie umożliwiające odłączenie komputera lub obsługę zdalną;
2. Gdy przełącznik wyboru trybu jest włączony
3. Zwróć uwagę na oś obrotu ramienia robota, bądź ostrożny w przypadku pomieszania włosów lub ubrania.Zwróć także uwagę na inne wybrane komponenty lub wyposażenie ramienia robota;
4. Sprawdź hamulec silnika każdej osi.
18. Odchylenie dotykowe
Zjawisko 1: Pozycja dotknięta palcami nie pokrywa się ze strzałką myszy.
Powód: Po zainstalowaniu programu sterującego pilot uczący nie dotykał pionowo środka pozycji tarczy podczas kalibracji.
Rozwiązanie: Ponownie skalibruj pozycję.
Zjawisko 2: Niektóre obszary mają dokładny dotyk, podczas gdy inne mają odchylenia w dotyku.
Przyczyna: Duża ilość kurzu lub kamienia gromadzi się na paskach odbić akustycznych wokół ekranu dotykowego Surface Acoustic Wave, co wpływa na transmisję sygnałów akustycznych.
Rozwiązanie: Wyczyść ekran dotykowy, zwracając szczególną uwagę na czyszczenie pasków odbijających fale dźwiękowe ze wszystkich stron ekranu dotykowego.Podczas czyszczenia odłącz zasilanie karty sterującej ekranu dotykowego.
19. Uczenie wisiorka dotykowego bez odpowiedzi
Zjawisko: Podczas dotykania ekranu strzałki myszy nie poruszają się i nie następuje zmiana pozycji.
Powód: Istnieje wiele przyczyn tego zjawiska, jak następuje:
1. Kurz lub kamień nagromadzony na paskach odbijających dźwięk wokół ekranu dotykowego Surface Acoustic Wave jest bardzo poważny, powodując, że ekran dotykowy nie działa;
2. Awaria ekranu dotykowego;
3. Karta kontrolna ekranu dotykowego działa nieprawidłowo;
4. Linia sygnałowa ekranu dotykowego uległa awarii;
5. Port szeregowy hosta działa nieprawidłowo;
6. System operacyjny pilota uczącego uległ awarii;
7. Błąd instalacji sterownika ekranu dotykowego.
Rozwiązanie: Obserwuj kontrolkę sygnału ekranu dotykowego, która w normalnych warunkach miga regularnie, mniej więcej raz na sekundę.
Po dotknięciu ekranu pilot uczący robi się czarny, co jest złożonym problemem.Jeśli ustawione jest oszczędzanie energii podświetlenia, czarny ekran jest normalny;Jeśli drugie słowo w obszarze kontrolnym systemu zostanie przypadkowo naciśnięte, ekran również stanie się czarny.Jeśli pierwsze dwa punkty są wykluczone, zaktualizuj oprogramowanie układowe do najnowszej wersji w celu sprawdzenia.
Wyślij zapytanie bezpośrednio do nas

